


Controlador inteligente de motor sin escobillas
Voltaje de funcionamiento: CC 24 V/48 V
Voltaje máximo de suministro: CC 16-55 V
Potencia del motor adaptable: 600W-1000W
Corriente nominal: 30 A
Tiempo de sobrecorriente: 500 ms
Retroalimentación de señal: codificador incremental, retroalimentación Hall
Doble canal controlable independientemente.
Algoritmo de control de movimiento PID inteligente.
Modo independiente de motor dual y modo mixto.
Descripción del Producto:
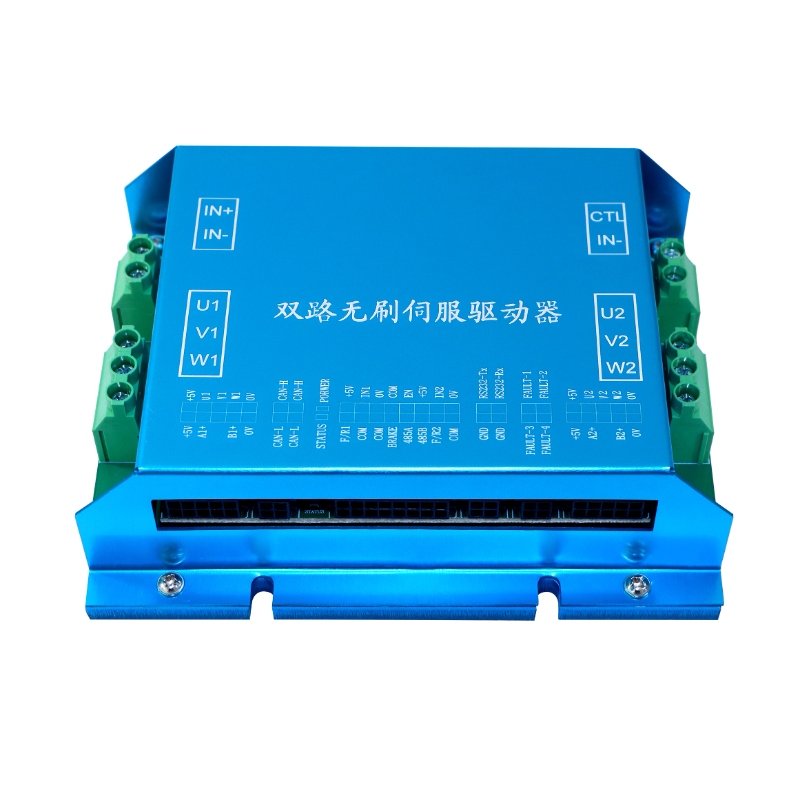
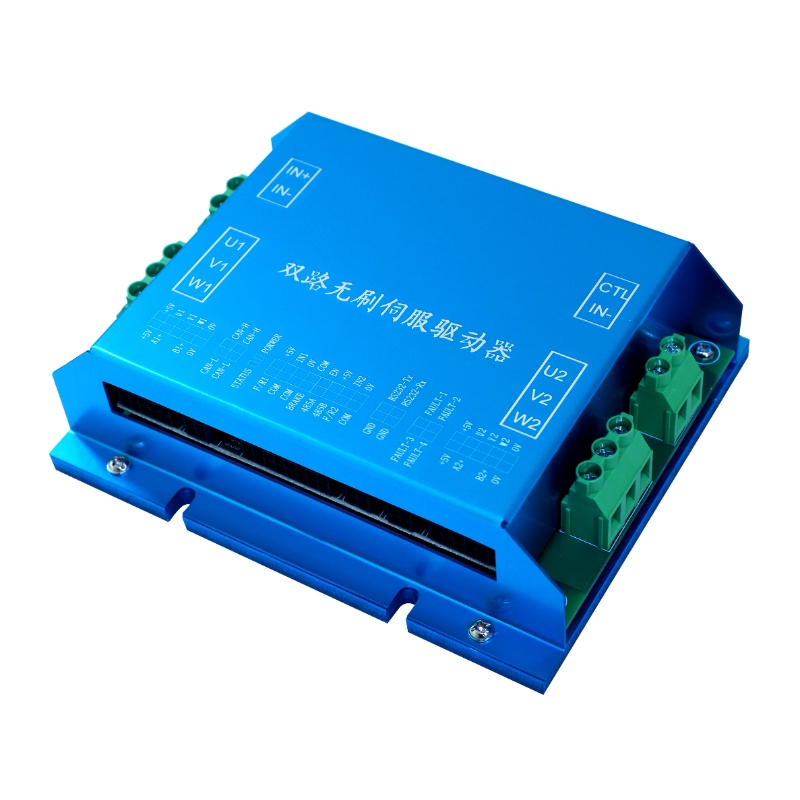
KYDBL4860-2E es un Controlador inteligente de motor sin escobillas. El controlador de motor dual sin escobillas puede controlar dos motores CC sin escobillas al mismo tiempo. Adopta MCU de alto rendimiento de 32 bits y un algoritmo de procesamiento de movimiento avanzado para realizar la función diferencial eléctrica interna. El controlador utiliza la señal Hall dentro del motor como retroalimentación de la posición del rotor y funciona con la señal del codificador incremental externo (línea 1000—2500) para controlar el movimiento del motor, realizando modos de velocidad de bucle abierto, bucle cerrado, modo de posición y modo de torsión. Tiene un chip controlador independiente de dos vías, un chip de procesamiento de codificador bidireccional y un chip de procesamiento de señal Hall bidireccional. Mientras tanto, tiene múltiples funciones de alarma de falla. Tiene dos modos de trabajo: modo independiente y modo mixto.
Imodo independiente:Permite el control independiente de motores bidireccionales, cuya señal de control se controla mediante señales de entrada bidireccionales. El motor de CC sin escobillas bidireccional controla la velocidad y la dirección del motor por separado.
METROmodo fijo:Puede realizar el control sincrónico (rotación hacia adelante, hacia atrás, izquierda y derecha) de dos motores sin escobillas.
La señal de control tiene hasta 8 modos (control remoto inalámbrico, balancín, potenciómetro, cantidad analógica, frecuencia, ancho de pulso, RS232, bus CAN). 
Parámetros del producto:
Modelo |
KYDBL4860-2E |
Parámetros |
|
Voltaje de funcionamiento |
CC 24 V/48 V |
Voltaje de suministro máximo |
CC 16-55 V |
Potencia del motor adaptable |
600W-1000W |
Corriente nominal |
30A |
Corriente máxima instantánea |
60A |
Tiempo de sobrecorriente |
500 ms |
Retroalimentación de señal |
Codificador incremental, retroalimentación Hall |
Modo de trabajo |
Modo de velocidad, modo de par, modo de posición |
Método de enfriamiento |
Enfriamiento natural |
Método de control |
RS232; CAN2.0; RC; 0-5 V; PWM |
Temperatura de funcionamiento. |
-25℃-+60℃ |
Temperatura de almacenamiento. |
-35℃-+65℃ |
Propiedades aislantes |
La salida y la entrada están aisladas a 600 V CC del chasis, la corriente de fuga es de 0,07 mA y la resistencia de aislamiento es superior a 20 MΩ. |
Propiedades protectoras |
A prueba de polvo, humedad y niebla salina |
Función protectora |
Retardo por sobrecorriente/Sobretensión/Subtensión/Sobrecalentamiento/Cortocircuito |
Rango de velocidad controlable |
0-6000 RPM |
Nivel de protección |
IP20 |
Dimensión |
190*130*45 mm |
Peso |
1,64 kilos |
Estándar del arnés de cableado |
1M |
Características del producto:
Entrada de voltaje de amplio rango, 16-55 V, voltaje límite máximo 60 V.
Lazo de control PID inteligente.
Modo de trabajo: control de bucle abierto de velocidad, control de bucle cerrado, control de bucle cerrado de par, control de bucle cerrado de posición.
Potenciómetro externo, modo de control de cantidad analógica de 0-5 V o comando de pulso, modo de control RC (señal de ancho de pulso emitida por el receptor del control remoto de aeromodelismo).
Control de seguridad hacia adelante y hacia atrás, operación de cuatro cuadrantes, regeneración de soporte.
Habilitar la función de control.
Control de corriente máxima.
Puerto de entrada de 4 vías; la función se puede definir como entrada analógica, entrada de pulso o funciones de entrada digital.
Salida digital de 6 vías (tubo MOS de drenaje abierto), que puede servir como salida de estado de alarma de falla del controlador y puede controlar el relé externo para realizar acciones como la desconexión automática de la energía.
Anormalidades como sobrecorriente, sobrecalentamiento, sobretensión y cortocircuito iniciarán la función de protección.
Indicador LED de estado.
Comunicación de bus CAN, consulte el protocolo de comunicación detallado al usarlo.
Comunicación RS232, consulte el protocolo de comunicación detallado al usarlo.
Comunicación USB, consulte el protocolo de comunicación detallado al usarlo.

Equipo avanzado y taller:

Certificado:

Preguntas frecuentes:


